与时俱进,诚赢客户
冠航机械七年坚持专注于建筑工程起重机械设备制造与销售服务
全国服务热线0571-88566309
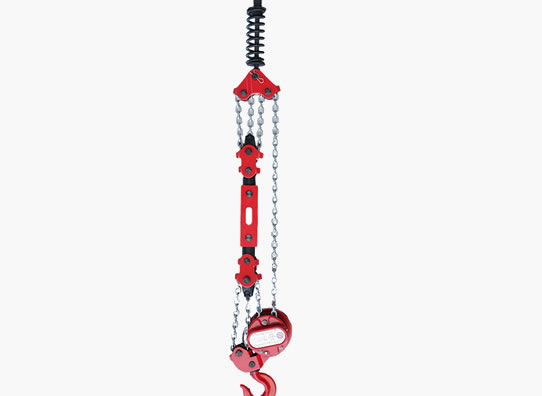
爬架电动葫芦的提升原理,本质上与爬架网的提升原理一致,即借助与建筑结构相连的电动葫芦,将外脚手架整体逐层向上提升。整个外架犹如高层建筑外围的一圈活动吊篮,能够随施工进度灵活爬升,既保证了作业安全,又提高了施工效率。
通常情况下,脚手架搭设高度为四层半。架体的最底部是整个结构的承力桁架,它承担着上部架体传递下来的全部荷载,并将这些受力可靠地传递给底部的承力托。当爬架处于固定状态时,承力托通过斜拉杆和穿墙螺杆,将荷载传递给建筑结构,确保架体稳定、安全。而当爬架需要提升时,承力托的受力路径发生变化——荷载经由电动葫芦、承力钢梁、提升拉杆及穿墙螺杆,同样传递给建筑结构,从而实现整体的平稳上升。

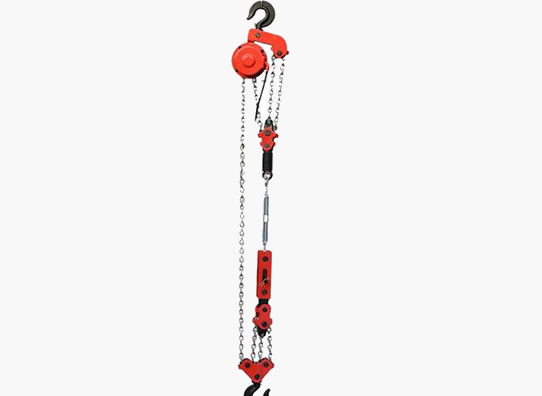
在具体操作中,爬架电动葫芦悬挂于提升钢梁上,提升钢梁则通过提升拉杆和穿墙连接螺栓牢固地固定在建筑物上。电动葫芦启动后,整体提升承力托,从而带动爬架向上移动。与此同时,导向轮和导向杆协同工作,有效防止外架在上升过程中发生倾斜,并起到垂直升降导向的作用,确保提升过程平稳、准确。
正是这一套科学合理的受力转换与导向系统,使得爬架电动葫芦能够在高层建筑施工中安全、高效地完成逐层提升的任务。