与时俱进,诚赢客户
冠航机械七年坚持专注于建筑工程起重机械设备制造与销售服务
全国服务热线0571-88566309
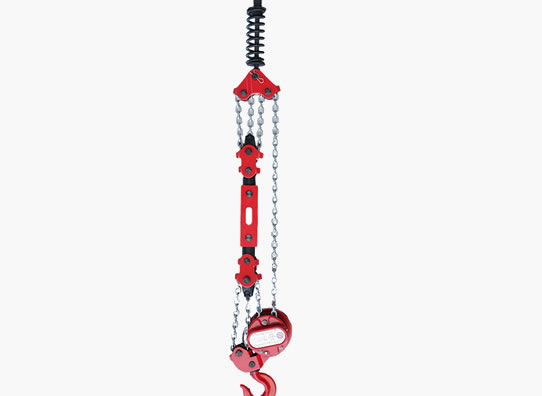
爬架电动葫芦作为高层建筑施工的精准传动-安全控制”三大核心展开,通过机械与电控系统的协同实现稳定升降。
从动力源头来看,设备以三相异步电动机为驱动核心,通电后电机转子高速旋转,将电能转化为机械能。电机输出轴与减速齿轮箱紧密连接,通过多级齿轮啮合实现降速增扭,这一步可将电机数千转的高速转速,降至适配爬架升降的低速,同时大幅提升扭矩,满足载重需求。

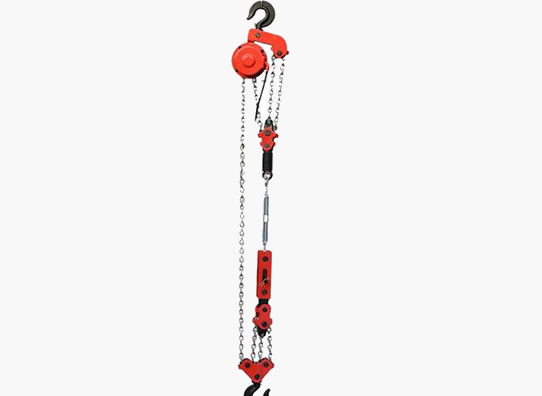
在升降驱动环节,减速箱输出轴连接钢丝绳卷筒,卷筒随输出轴同步转动。当卷筒正转时,钢丝绳通过滑轮组被缠绕收起,带动爬架架体沿导轨向上爬升;反转时则释放钢丝绳,架体在自重与导向装置作用下平稳下降。值得注意的是,滑轮组不仅改变力的方向,还能进一步放大牵引力,降低电机负载。
安全控制是运转原理的关键一环。设备内置电磁制动器,电机断电时制动器自动抱死输出轴,防止架体坠落;同时配备超载限制器与行程开关,当负载超过额定值或架体达到预设高度时,系统会自动切断电源,双重保障施工安全。整套装置通过电控柜实现远程操控,操作人员可精准控制升降速度与启停,确保爬架与建筑施工进度同步。